18ECO124T - HUMAN ASSIST DEVICES UNIT 1 - 12M
Explain in detail about the EOG Based Voice controlled wheelchair with a neat diagram.
Biological signals used to control WC:
Electroencephalography (EEG)
Electromyography (EMG)
Electrocardiography (ECG)
Electrooculogram (EOG)
Eye movements create micro potentials called EOG signals; electrodes are present around the eye
Simple pattern matching technique is used to detect and classify eye movements
To process the signal, instrumentation amplifier, high pass filter, low pass filter and notch filter is used
Block diagram:

Electrode selection:
The electrodes were chosen with the concern of protecting the eyes from hazardous elements
ECG disposable electrodes are easily available
The main feature that makes Ag/AgCl electrodes superior to other metals is their low offset potential
Ag/AgCl electrodes are stable regardless of the direction of the current flow
Ag/AgCl electrodes were chosen considering low cost, convenience, proper signal acquisition, accuracy and reliability
Amplifier module:
This module amplifies the EOG signals to the level which can be processed on a microcontroller
The EOG signal has a frequency range between 0 and 30 Hz and amplitude between 100 to 1000 v
Filter design:
The filter is designed in two stages
High pass filter with 0.16Hz cut-off frequency
Low pass filter with 30 Hz cutoff frequency
Ground shifting problems occur in the EOG signals
A high pass filter was used to eliminate this problem
Divider circuit:
This model was built using the operational amplifiers in both inverting and noninverting configurations
Gain of this module is tuned in such a way that the whole span of the signal lies between 0 and 5 V
Trainer module:
The rainier module scrutinizes the EOG signal in different stages of training and measures the following parameters of the signal
Maximum noise peak of channel 1 or 2
Maximum noise peak of channel 3 or 4
Maximum amplitude
Maximum pulse duration
Maximum blink peaks
Maximum blink durations
Processing module:
This module, implemented on a microcontroller determines whether the received signal is a valid command or not
This identifies the valid signal pulses, using maximum value and duration of pulses
User interface:
As a safety precaution, enable and emergency stop buttons are implemented and these buttons can be placed according to the user’s convenience
It even can be integrated with the wheelchair’s sensor outputs
Write in detailed about the BCI Based wheelchair with a neat diagram
Block diagram:

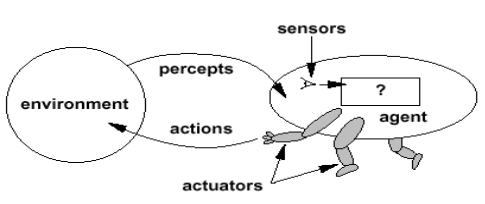
Brain Computer Interface (BCI) serves as the pathway of communication between the brain and any other external entity
The EEGs or brain waves are captured and analyzed using NeuroSky mind-wave mobile to yield attention, meditation and blink strength
The system was developed with minimal cost and ensures minimal setup time
Idea of the proposed system:

The aim behind the proposed system is to develop a smart wheelchair which can be controlled through three different modes
Brain control is defined as the primary control while joystick and remote control are considered to be the secondary controls for the wheelchair
All the three modes are independent among one another, which allows the user to switch the control of the wheelchair at any time
An ultrasonic sensor based safety system is interfaced with each control mode to make the wheelchair safe and secure for the user
Primary control system:
Brain control is considered as the primary control of the wheelchair
It involves the EEG data acquisition using Mindwave mobile headset
An android based smartphone is the platform which is used to receive the EEG data
The android application is developed using an android development toolkit provided by NeuroSky
The application follows bluetooth communication protocol to receive the EEG signals from the wireless headset and transmit the required output using the same protocol
Explain in detail about the fuzzy logic expert system for automatic tuning of myoelectric prosthesis with a neat block diagram.
Fuzzy based voice control automatic tuning of myoelectric prosthesis:

The package core consists of fuzzy logic expert systems that embody skilled operator heuristics in the tuning of prosthesis control parameters
The prosthesis system is an artificial arm-hand system developed at the National Institute of Accidents at Work laboratories
The prosthesis is powered by an electric motor that is controlled by a microprocessor using myoelectric signals
This procedure is not very practical and involves a waste of time for the technicians and uneasiness for the clients
Myoelectric prosthesis general layout:

The prosthesis is controlled by surface EMG signals from remnant muscles
EMG signals are acquired by skin-surface electrodes and processed by a small custom electronic board inserted in the prosthesis
The board is governed by the industry-standard microprocessor INTEL 87C196KC with input signal analog to digital converter and pulse width modulation for motor
MCA automatic tuning block diagram:

The MCA automatic tuning software works as follows:
The client connects the prosthesis hardware to a personal computer via the serial port and runs the program: MCA Auto Tuning
The program acquires both sensor signals as well as client input
The program the qualitative and numerical information with the expert human knowledge stored in the fuzzy logic database to compute the prosthesis parameter values
At the end of the procedure, the program enables the new parameter values to be downloaded into the prosthesis control-system memory
Comments
Post a Comment